Máy in 3D đã được phát triển nhanh trong vài năm qua, nhưng quá trình căn chỉnh bàn in vẫn còn là một vấn đề khó khăn với người mới. Chúng ta hãy cùng tìm hiểu các giải quyết vấn đề này và liệu những giải pháp mới gần đây có thành công trong việc tự động hóa quá trình nhàm chán này không.
Việc cân bằng bàn in và hiệu chuẩn lớp đầu tiên thường khó khăn hơn đối với những người mới làm quen với máy in 3D, đây là một kỹ thuật quan trọng quyết định chất lượng của sản phẩm in 3D. Công việc này trước đây đòi hỏi người vận hành máy in 3D học cách xử lý theo thời gian và kinh nghiệm, và chủ yếu vẫn sử dụng các cách thủ công dựa trên phán đoán.
Một số máy in 3D đang áp dụng một cách tiếp cận mới để cân bằng bàn in và hiệu chuẩn lớp đầu tiên, cung cấp giải pháp tự động cho người mới sử dụng cũng như giảm thiểu công đoạn cho người dùng có kinh nghiệm. Chúng tôi đã thử nghiệm cách cân chỉnh bàn in mới này, vì vậy hãy cùng xem tính năng mới nhất tự động hóa công việc nhàm chán này trong bài viết dưới đây.
Tại sao phải căn chỉnh bàn in và lớp in 3D đầu tiên
Theo thuật ngữ máy in 3D, căn chỉnh bàn in là một quá trình mà kết quả cuối cùng là nhận được lớp đầu tiên của bản in được cố định hoàn hảo trên bàn in nhiệt. Lớp đầu tiên tốt là nền tảng của một bản in thành công.
Để thực hiện điều này, đầu in cần phải giữ một khoảng cách không đổi so với bàn in nhiệt trong quá trình di chuyển của nó. Nếu đầu in quá gần bàn in ở một số nơi, nhưng quá xa ở những nơi khác, sẽ dẫn đến chất lượng bản in kém và bong tróc lớp in đầu tiên.
Điều chỉnh bàn nhiệt của máy in cho đến khi nó song song với mặt phẳng di chuyển của đầu in. (khoảng cách không đổi từ đầu in đến bàn nhiệt ở mọi vị trí của bàn in.)
Bước tiếp theo là điều chỉnh lớp đầu tiên. Điều này điều chỉnh khoảng cách trục Z giữa đầu in và bề mặt của bàn nhiệt. Kết quả chỉ cần có đủ không gian để lớp nhựa đầu tiên được bám dính đồng đều trên bàn nhiệt, lớp in có độ dày đồng đều và được ép vào bề mặt bàn nhiệt đủ tốt để không bị bong ra trong quá trình in.
Điều này phức tạp vì thực tế là không có mặt phẳng nào là hoàn toàn phẳng. Khi sai số chỉ được tính bằng một phần mười milimet, ngay cả những sai sót nhỏ cũng gây ra vấn đề lớn. Các điểm cao hoặc điểm thấp trên bàn nhiệt là vấn đề khi bàn in bị nghiêng, không vuông góc với trục Z của đầu in. Đây là một trong những lý do khiến vấn đề cân chỉnh bàn in vẫn tồn tại trong thời gian qua.
Công việc căn chỉnh bàn in không phức tạp, nhưng nhiều yếu tố liên kết với nhau có thể làm cho nó trở thành một công việc phức tạp và khó khăn. Không có gì ngạc nhiên khi mọi người đã thử những cách khác nhau để làm cho công việc này trở nên dễ dàng và ổn định trong quá trình in 3D.
Một số gải pháp trước đây
In lớp đế (hay còn gọi là Raft trong cài đặt máy in 3D) là một phương pháp được ứng dụng đầu tiên để xử lý các điểm không bằng phẳng của bàn in, nhưng hầu hết các giải pháp mới hơn đều xoay quanh việc căn chỉnh bằng lưới.
Căn chỉnh bàn nhiệt bằng lưới là một phương pháp tự động bù độ lệch của bàn in trong phần mềm, nhưng nó yêu cầu thêm phần cứng để đo bề mặt bàn nhiệt. Bằng cách thực hiện các phép đo bằng cảm biến, một mặt phẳng dạng lưới được mô phỏng trong phần mềm. Dựa trên mặt phẳng lưới này phần mềm sẽ tự động bù độ cao Z của đầu in với các điểm thấp và điểm cao hơn mức trung bình.
Một cách để thực hiện việc đo lưới bàn nhiệt là sử dụng cảm biến tiệm cận để xác định khoảng cách đến bàn nhiệt. Máy in Prusa sử dụng phương pháp này để thực hiện các phép đo theo lưới 3 x 3 hoặc 7 x 7 tùy chọn trước mỗi lần in.
Một lựa chọn khác là một đầu dò với công tắc hành trình ví dụ: BLTouch, nó là một bộ cảm biến phổ biến thực hiện tiếp xúc vật lý với bàn in. Thành công của nó cũng như tần suất nó được sao chép là bằng chứng cho thấy việc căn chỉnh bàn in vẫn là một vấn đề khó khăn đối với người dùng máy in 3D.
Giải pháp căn chỉnh bàn in 3D mới nhất
Phương pháp này sử dụng chính đầu in như một cảm biến. Không chỉ dễ dàng hơn trong việc thực hiện các phép đo từng điểm mà đầu in thực sự tiếp xúc với bàn nhiệt, nó cũng tiềm năng để tự động thiết lập độ lệch Z thích hợp.
Một cách để làm điều này là tích hợp một máy đo biến dạng vào chính đầu in, biến đầu in thành một loại cảm biến lực. Chúng tôi đã thấy cách tiếp cận này trong một dự án DIY sử dụng điện trở SMD đo biến dạng và phương pháp này cũng được sử dụng trong Smart Effector dành cho máy in delta .
Hai máy in 3D tiêu dùng gần đây, Anycubic Vyper và Creality CR-6 SE, đã triển khai ý tưởng do chính họ sản xuất. Chúng tôi đã thử nghiệm một máy in Vyper mẫu đặc biệt từ Anycubic để kiểm tra tính năng này, vì vậy chúng ta hãy xem xét thực tế.
Cảm biến lực tích hợp đầu in 3D hoạt động như thế nào
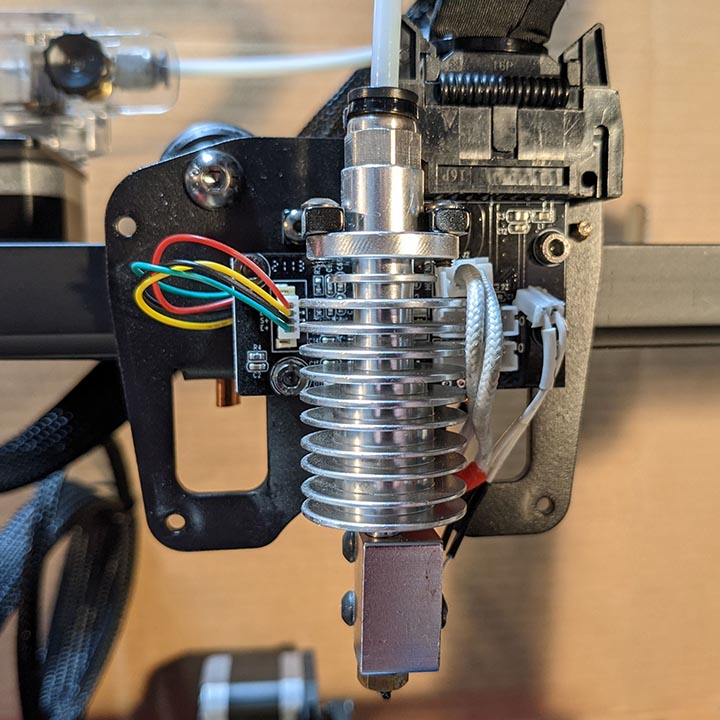
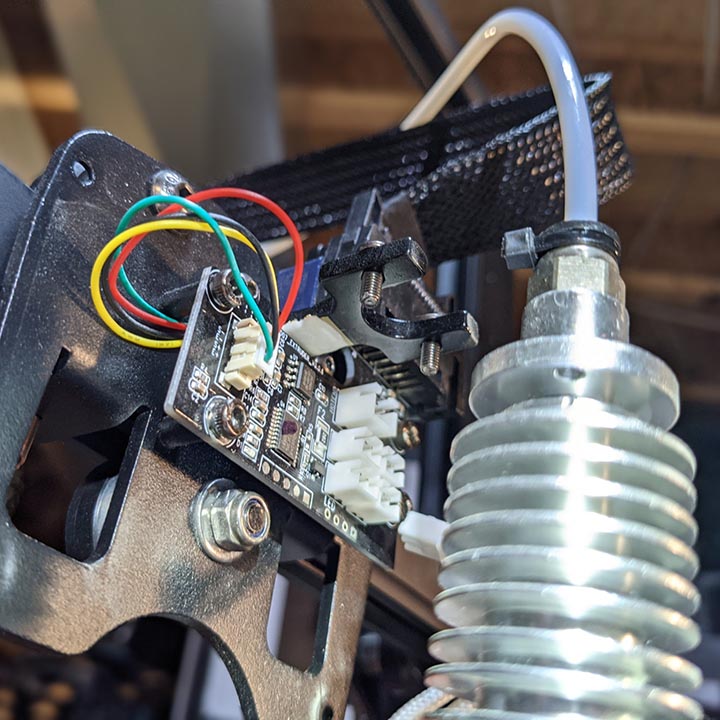
Cụm máy đùn của Anycubic Vyper có một giá đỡ kim loại hình cái nĩa cho đầu phun có gắn một cảm biến load cell (cảm biến lực). Điều này biến nó thành một cảm biến lực tương tự như cơ chế của cân điện tử.
Bất kỳ lực nào tác động lên đầu nóng sẽ làm biến dạng load cell, cảm biến lực này sẽ chuyển lực tác động thành tín hiệu điện có thể đo và định lượng. Ngay cả khi lực tác động rất nhẹ trên đầu in cũng có thể được phát hiện theo cách này.
Nhờ chức năng này, bản thân vòi phun trở thành một bộ cảm ứng. Khi máy tự động cân bằng bàn in, đầu in được hạ xuống cho đến khi vòi phun tiếp xúc với bàn nhiệt. Ngay cả một cái chạm nhẹ cũng có thể được phát hiện một cách đáng tin cậy, vì vậy quá trình này không cần nhiều lực.
Bằng cách thực hiện nhiều phép đo như vậy theo mô hình lưới, phần mềm có thể thực hiện bù khoảng cách tự động trên trục Z. Đây là một ý tưởng tốt và đầu in đã được thiết kế hỗ trợ tính năng này.
Kết quả của giải pháp căn chỉnh bàn in 3D mới
Nó hoạt động tốt như thế nào? Tôi rất vui khi nói rằng tính năng nàythực sự có hiệu quả, máy in có thể tự động bù khoảng cách trục Z hiệu quả cho lớp in đầu tiên.
Bạn chỉ cần lắp bàn in, đảm bảo đầu phun và bề mặt bàn nhiệt sạch sẽ, sau đó khởi động máy in thực hiện quá trình tự động san phẳng.
Máy in 3D sẽ gia nhiệt bàn in trước, đảm bảo các phép đo được thực hiện trong cùng điều kiện in, sau đó vòi phun chạm vào bàn nhiệt theo dạng lưới 4 x 4, phần mềm sẽ tự động tính toán và áp dụng cân bằng lưới.
Tính năng offset trục Z ban đầu cũng được hỗ trợ để bạn tinh chỉnh nếu muốn. Về lý thuyết, quy trình không cần phải thực hiện mỗi lần in trừ khi bạn thay đổi bàn in nhiệt, nhưng bạn có thể kích hoạt quy trình hiệu chuẩn bất cứ khi nào muốn.
Giới hạn của giải pháp cảm biên lực đầu in 3D
Tự động căn chỉnh bàn in hoạt động hiệu quả, nhưng nó cũng có những giới hạn. Trước hết, các vấn đề liên quan đến chất lượng hoặc loại dây nhựa, hoặc vật liệu của bàn in nhiệt, là những vấn đề vẫn có thể gặp phải. Những điều này không được khắc phục bởi giải pháp căn chỉnh bàn in nhiệt khi cho ra kết quả cuối cùng của bản in.
Cả bề mặt in và đầu vòi phun phải sạch để có được kết quả tốt nhất, vì vậy tốt nhất bạn nên tháo dây nhựa ra khỏi đầu in trước khi tự động cân bằng bàn nhiệt. Điều này là vì máy in sẽ gia nhiệt trước khi thực hiện căn chỉnh và chạm vào bàn in hai lần ở mỗi điểm lưới, nếu đầu in vẫn đang được nạp dây nhựa sẽ để lại một ít nhựa nóng chảy ở mỗi điểm và chúng có thể ảnh hưởng đến độ chính xác của phép đo.
Có một giới hạn đối với mô hình lưới 4 x 4 mô phỏng mặt bàn in. Bề mặt bàn in bị cong vênh quá nhiều có thể không được mô phỏng chính xác. Điều này là do độ phân giải của lưới bị cố định ở 4×4 đôi khi sẽ không thể mô phỏng chính xác mặt phẳng bàn in. Sẽ rất tuyệt nếu có một tùy chọn để tăng số lượng điểm đo hoặc có thể tinh chỉnh lưới theo cách thủ công, như một cách để xử lý với các trường hợp đặc biệt.
Cuối cùng, phần mềm của máy không hiển thị chi tiết về quá trình tự động cân bằng của nó. Dường như không có cách nào để sửa đổi độ nhạy, không có cách nào để xem các phép đo thực tế đã thực hiện và không có cách nào để tinh chỉnh thủ công bất kỳ thứ gì khác ngoài Z-offset, có thể thay đổi lên hoặc xuống mỗi 0,05 mm.
Kết luận
Tính năng tự động san lấp mặt bằng và bù Z hoạt động và cho kết quả có thể sử dụng được, nhưng phần mềm không hiển thị và tùy chỉnh nhiều về những gì chính xác đang diễn ra. Nó khá tiện lợi, tích hợp cảm biến đo biến dạng là một giải pháp thông minh rất hay đối với máy in 3D. Hy vọng giải pháp này sẽ được tiếp tục phát triển và hoàn thiện hơn nữa trong tương lai.
Nguồn: biên tập thietbiketnoi.com